
Manufacturing experts at Munro & Associates are tearing into a Tesla Cybertruck right now and discovering some fascinating stuff. What’s especially cool is their recent teardown of the truck’s steering system, which is totally different than a conventional steering system in that the steering wheel is not mechanically connected to the front wheels. That may sound dangerous to you, but it turns out, Tesla has lots of redundancies built in. Here’s a look at some of them.
OK, first things first: We should look at how a typical automobile steering system works. When you turn the steering wheel, a torque sensor either near the steering wheel or built into the rack reads your steering input input and processes it through a controller, ultimately sending current to an electric motor in the steering rack. This electric motor then moves the rack left and right, which moves the tie rods in and out, pushing or pulling the steering knuckle, turning the car’s wheels. Thus, it’s the electric motor doing all the work; your hands are only giving an input telling that motor which direction it should spin and how much effort it should exert.
Still, there is a physical connection between the steering wheel and those wheels, so if the power steering stops working, you can still turn. Here’s what a typical electric power steering system looks like.
A Typical Steering Rack

Your steering wheel connects to a steering intermediate shaft, which is shown below. It has two universal joints in it to allow it to rotate even when you tilt the steering wheel up and down, and even when the car flexes a bit during driving. It’s also designed to collapse in the case of a crash:

That intermediate shaft connects to a steering rack, which looks like this:
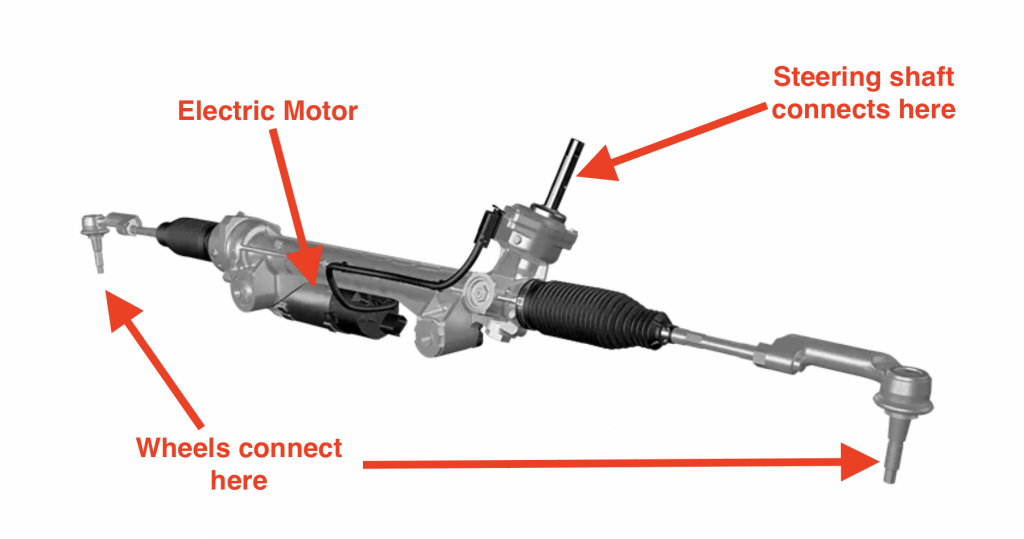
As you can see, even if you for some reason lose power and the electric motor stops assisting you, you can still turn the wheel, which will send torque down the intermediate shaft, into the rack, and across those tie rods that are connected to the front steering knuckles that the wheels bolt to (via a wheel hub).
It’s worth noting that sometimes, in cases where packaging can be tricky, the electric motor is connected to the column/intermediate shaft itself, spinning it instead of directly acting on the rack. Nonetheless, this doesn’t change my main point, which is: On a typical steering system, there is a physical connection between the steering wheel and the front wheels.

Tesla’s Steer-By-Wire
The Tesla Cybertruck is different. It uses a so-called “steer by wire” system (Infiniti had a similar system, though there was a clutched mechanical backup; the Tesla has no such thing), which means that you replace that intermediate shaft shown above with… a wire. That’s it. There is no physical connection between the steering wheel and the wheels. If the system fails completely, turning your steering wheel will not result in the front wheels turning.
View this post on Instagram
As you can imagine, a complete system failure simply can not happen, which is why Tesla and ZF (the steering supplier) have built in multiple failsafes, which Munro & Associates explores in this new video.
As shown and mentioned before: There is no intermediate shaft. At all. The steering wheel connects to a contraption that includes a tilt/telescoping steering wheel position-adjuster, an electric motor, and various sensors. Below is the entire steering “column.”
Steering ‘Feel’

The column features a force-feedback motor that takes input from the steering wheel sensor and steering rack and actually “”artificially” sends forces into the steering wheel so that the driver experiences an intuitive “feel” based on the driving situation:

Munro went for a ride with Chris Mantzios, ZF’s Vehicle Dynamics & Steering Feel Specialist. He described to Sandy and the team how that motor in the steering column works with the whole system to give the vehicle a natural steering feel.
“We wanted to show how natural the steering effort feels in the vehicle…We do have a steering input that we read from our sensor,” he says in the video above. “We send that signal right to the front wheel actuator, which is in position-control…it will ask the front wheels to turn so much. Because it’s in position-control, the motor has to overcome the load to basically get to that position…we look at the motor information and we convert all that intelligently into a rack force. Then that rack-force…we do put it through what we call an inverse boost curve that will give us a torque request to the hand wheel. And our torque controller on the hand-wheel generates that torque for you.”
Here is the sensor in the column that reads the driver’s input:

Tesla’s Ethernet Cables And 48-Volt System
Those steering inputs from that sensor get sent into these ethernet cables:

Notice how these cables are sending signals and motor power through small wires/connectors. They’re able to do this because of relatively low I^2R losses since the Cybertruck incorporates a 48-volt system instead of a 12-volt system. We know that Power is equal to current times voltage; so if you need a certain amount of power for an electric motor to turn front wheels, then if you quadruple the voltage, you can divide the current by four. Less current means fewer I^2 losses, which are generally what dictate wire thickness.


I have to say: The flat ethernet cables are fascinating; typical harnesses in cars are round, and feature relatively fat insulated wires. To see this flat thing with small connectors at each end — very interesting.
Redundancy Is Key To Steer-By-Wire’s Safety
Notice that there are two cables — that’s in order to provide redundancy to the steering wheel input signal, which gets sent to a module. That module isn’t shown in Munro’s video since it’s been analyzed by a client (probably an automaker or supplier looking to gain insight into Tesla’s work), but its job is to interpret the steering signal that the driver gives, and to then send an output signal to the motors on the steering rack:

Look at that rack. It looks totally different than a typical electric power steering rack, as not only is there no input shaft, but there are two motors driving the sliding rack. Those are there for redundancy in case one fails. Here’s a look from behind:

You can see that each motor has its own sensor to tell the module where the wheels are facing:

In addition, there’s a third sensor that acts as a so-called “tie breaker” in case there’s a discrepancy between the two motors’ sensors. “This is a triple-redundant system,” Munro says:

Update: It’s worth noting that, in the “how steer-by-wire” works video from Munro, a ZF rep response to a question about redundancy, saying: “There’s always a focus on dueling redundancy. There’s multiple aspects: You have to have abilities to have… dual power capability, there’s dual communication, there’s dual sensing technologies.” Based on that, it sounds like there have to be two isolated power sources, though I’ll want to dig into that further.
The Cybertruck’s Rear Steering Is Simpler
Out back, things are a little simpler, with the setup quite similar to typical rear-steer arrangements you might find in Porsches and Audis (though I’m fairly sure their systems don’t have ball joints, but rather just moves the rear “knuckles” in the bushings). There’s not much in the way of redundancy, but the good news is that if the rear-steer fails, it’s only steering a maximum of 10 degrees, and you’ve still got the fronts to keep the vehicle from going out of control.

Here’s how the Audi A8’s rear-steer works:
And just for fun, here’s GM’s Quadrasteer rear-steer system from 20 years ago:
How Do You Feel About Steer-By-Wire?
Are you cool with your steering wheel not being mechanically connected to the front wheels? Do you trust ZF’s/Tesla’s redundant system (great video above by ZF showing how it all works), or is there a bit of hesitancy on your side that it could all fail, and you’d be stuck unable to turn the vehicle?
To be, it seems like a cool system, and I see the advantages — specifically that you can change the steering ratio as a function of a number of inputs, such as vehicle speed (the Cybertruck turns farther for a given angular displacement of the steering wheel at slow speeds than it does at high speeds). And it does offer packaging advantages, though those redundant motors take up space, and add cost and weight. It’s interesting, but is it better overall? It’s hard to know.



There’s a lot here that is very innovative and cool but it seems to me that the whole Cybertruck steering system is an answer to a question no one is asking. When all you have in the front of the car is a frunk and an electric motor, packaging an intermediate shaft is not a problem. There is space. The motivation for this must be something else.
Being able to vary steering ratio based on speed and steering input speed (and other factors) means you can design the system so you never have to go hand over hand on the wheel. This would be a great way to make a yoke steering wheel work since you never have to move your hands. But who is asking for a yoke steering wheel?
I also think the airplane comparison is incorrect. Airplanes have triple redundancies in their safety critical systems, and a very stringent maintenance schedule that absolutely must be followed. Cars have no such thing and judging by what is driving on our roads, it seems to me that maintenance is at best an afterthought for many drivers.
Not having a mechanical backup scares me but maybe I’m the fuddy-duddy in the room here.
If it’s 100% steer by wire, you can lose HV, 48v, and 12v power…. then you lose all steering.
STUPID
FUCKING
IDEA
Happened already
If it’s 100% steer by shaft, then if you lose the shaft or any the of the joints in it, then you lose all steering.
I don’t know that I think it’s a good idea, but it’s wack that you guys are complaining about redundancy. It’s replacing a non-redundant system with a redundant one.
Mechanical systems require much more significant failures than electrically based ones. For example, I have redundant sump pumps cause if I lose power, I don’t want my basement to flood. So I have a 12V backup system.
My front door lock? They’re pretty straight forward and don’t require power so I don’t have a redundant mechanism for them. The odds of its failure are SIGNIFICANTLY lower.
I guess the ethernet cables are redundant in the sense there are two cables, but since they go through the same connector it still has a single-point failure. Maybe I’m overthinking that part. Like Sandy says in the video, planes are fly-by-wire so the base tech is proven, but Tesla isn’t the bastion of build quality you expect from airplanes. Then again Boeing is still around so….
Planes are also built to aircraft specifications. Lots of redundancy and durability baked in. They also have frequent inspections and are horrendously expensive to fix.
Tesla build quality appears to be getting better, but not sure it’s on par with “aircraft” quality yet. And cars typically don’t get the kind of scrutiny and maintenance that commercial planes do.
It looks like a really cool technology, but I’d be worried about it not aging well and starting ot cost a fortune to fix. And it’s not like A/C or a radio that isn’t essential to the safe operation of the car. Steering is kind of a critical function.
We really don’t NEED this type of steering system.
Lost a gauge bulb the other day, came back when I smacked the dash. If you lose steering just kick the firewall a couple times, I’m sure it’ll be fine.
I really don’t see how this is better than regular electric assist, and even with the consideration of assembly and engineering costs I can’t imagine it’s cheaper either.
Tesla is hellbent on doing things “differently”, not necessarily better. And the Cybertruck seems extra-focused on cramming as many different new things in as possible.
“New is always better”
https://www.youtube.com/watch?v=NpnG044XzIo (HIMYM/Barney clip)
Maybe this is related to autonomous driving and/or driverless taxi plans.
If not, I agree, for what?
That is true, would be better to just not let the wheel move if the car is doing the driving (pinch points rotary hazards and what not). One niche use case to benefit a system they’re not even allowed to deploy.
to me it sounds like a lot of change for the sake of change, but i do remember Hubert mentioning that designing a steering column is a very involved and expensive process(this was the model S steering rack article). I would love to hear his take on this.
The part of the steering column that is so hard to design has nothing to do with the way the steering system functions. It has to do with crash safety. The column is an integral part of absorbing the energy of the driver’s body in an impact and that would still be the case with a steer-by-wire system.
article? 🙂
Imagine someone out exploring logging roads in the middle of nowhere and ends up just a bit too far from the next charging station. His CT is completely out of juice, and he can no longer steer it. I’m very much in favor of electric vehicles, but you couldn’t pay me to drive a CyberTruck. Heck, it can’t even survive a trip through a car wash. One hungry rodent nibbling away among the cables will wreak havoc on these. We’ll probably see an Autopian article on that little nightmare about this time next year.
No.
“Based on that, it sounds like there have to be two isolated power sources, though I’ll want to dig into that further.”
So, NOT REDUNDANT. Unless there is a complete separated battery, cabling, and control systems, there is no redundancy.
Brake-by-wire was Philip J. Fry stupid. Steer-by-wire goes even further, it’s Patrick Star stupid.
Totally agree. I love nerding out about creative ways to solve problems, but this… just makes me nervous.
I had an old Volvo with electrical gremlins as my first car. It liked to lose power completely while I was driving. I used the old-school mechanical steering linkage a few times to pull to the shoulder when the engine and electrical power all died. Unless they’ve really figured out power redundancy, you wouldn’t have that option here.
Part of me also wonders about how designs will ‘age safely.’ Like, the Cybertruck is new and flashy now. But in 20-30 years, someone will be driving this around as a beater. At that point, do we trust the redundancy when it’s also developed electrical gremlins and wiring problems?
Bold of you to think that these will still be roaming the earth in 20-30 years. I would expect that once the original battery fails to hold its charge any more the whole thing will go to the recycler – I can’t imagine it’ll be cost effective to replace the battery in 15 years time and keep one of these clunkers on the road.
This is your truck (Imagine an F-150, a Silverado, or a Tundra.)
This is your truck on drugs (Imagine a CyberTruck).
Any questions?
I feel more comfortable with a steer by wire since there are so many redundancies, but it’s just Tesla’s build quality in general that scares me. Still, it would have been simpler to just add a shaft instead of throwing in so many motors and redundancies. I really don’t get their thinking sometimes.
You know what’s a better, cheaper, more efficient solution than two wire looms, two motors and bunch of electronic wizardry? A f-cking metal shaft.
Came here for this. I struggle to justify all that extra hardware just to simulate the real thing and make sure it’s as safe as one, unless there are other benefits.
The best thing about a big metal rod? Rodents can’t chew through it.
My kneejerk reaction is that I don’t like this and it doesn’t provide anything I want that can’t be done with a traditional steering system. That said, I would be interested to drive something with the variable ratio steering where you never need to turn the wheel past 120 degrees or whatever it is. I’m not sure I’d like it, but it’s the one thing about this I could see being useful.
Still wouldn’t trust a “move fast and break things” company like Tesla to implement it though. They don’t exactly have a sterling reputation for thinking through their new features.
My 1984 Honda Prelude had speed-sensitive power steering. The ratio didn’t change, but the assist varied from full at parking speeds to basically none at high speed. A consistent ratio meant that the steering worked the same way at all speeds; you didn’t have to deal with a change in ratios as you were driving a winding road with varied speeds, as one often did in a Prelude.
Of course, that was 40 years ago, so I’m sure Honda engineers back then were just too naive to create a more complex, heavier, potentially less-reliable system.
Also, squirrels will love those ribbon cables. “Look! Dental floss!”
My 1988 Honda Prelude had the 4WS option and I’ve never driven another car since then that was more communicative and nimble.
That was 20 years ago when I finally sold it. WTF was I thinking?
Our SAAB 9-3 has “passive” rear wheel steering.
Have you considered tightening the bolts
What is really fun with steer by wire, is you can program it to turn the opposite direction as the steering wheel, got to do this back in college, and it makes 15mph driving quite an entertaining challenge. Could be a fun April 1st software update.
Oh Jesus don’t give them ideas
well maybe people who play games with inverted control will love it
I drove a car setup this way many years ago and it was i-m-p-o-s-s-i-b-l-e! It’s like trying to ride a bike with your arms crossed. YOU CAN’T DO IT!!!
This “redundancy” still assumes power is always available. “Let’s remove something that’s fool proof and has had decades of development and replace it with something heavier, more complicated, and requires artificial feel to replace what was inherent in the proven system.” And 10 degrees of steering on the rear wheels could have a MASSIVE effect if that fails. Is the typical douchebro who buys one of these going to be able to drive around a sudden failure in the rear? I guess it doesn’t matter as if it accompanies a total system power loss, they’re Slim Pickens riding a bomb, anyway. I hope when one of these PIT maneuvers itself, it’s caught on someone else’s dashcam. AEB systems can’t do their jobs properly from multiple manufacturers even with pretty lax requirements to pass the test. Oh, and Tesla’s already had issues with this BS system. I need to get started constructing guillotines.
Somehow I keep expecting them to open some part of this thing and find a family of possums
Ahem, they’re called Cyberpossums.
I call the big one “Bitey”
I don’t really have any safety concerns. However, I still don’t like it. I don’t like steer-by-wire for the simple fact that it makes the driver further removed from what’s happening at the wheels.
But it’s a truck. No truck has great steering.
your reply is not really a direct response to Trust’s comment.
Yes it is, since his complaint implies that non-steer by wire alternatives would have the driver be less removed. Well, all the alternatives are other trucks, and that simply isn’t the case. So, in the case of steer-by-wire, it’s not actually making the driver “further removed” than what the competition offers.
Define truck.
And no, that’s not a dig at the CT, deserving of digs as it may be.
It doesn’t really need to be defined. The only “trucks” (on even the loosest definition) that is going to offer better steering feel is probably a Santa Cruz. That’s literally it. Nothing else is going to offer better steering feel. You think a F150 would? Nope. You think a Rivian R1T would? Nope. They all have disconnected steering feel.
As a professional firmware engineer (not in the automotive field) I have a ton of safety concerns. Even if you ignore SW issues, there’s power failures, loose connectors, frayed or broken cables, electronic noise causing signaling issues, another device going bad and flooding the bus with garbage or pulling the data bus to zero.
Every one of those things have happened in systems I’ve worked on. I’m sure there are others, but that’s what I thought of while writing this.
Well NOW I have safety concerns.
I guess my job here is done.
Let me add that I’m a paranoid person in general. When I got out of school I had the opportunity to work on implanted medical devices or PC joysticks. I went the PC joystick route because I figured a SW problem in a joystick can cause someone to lose a life in their video game. That’s a lot less serious than a SW problem in a pacemaker.
Being a bit paranoid as an engineer makes you aware of ways a system will fail, and design in margin.
-former embedded systems designer, now prescribing medical electronics
It’s always fun to coach less experienced software engineers through failure mode analysis and making their programs more resilient. Which generally does not mean mindlessly wrapping every LoC in try-catch.
Well, unless someone gets the bright idea of using it to control a carbon-fiber submarine. Not that the game controller ended up being the biggest problem with that design, but it certainly was a critical component.
Adding 2 extra motors (assuming the force feedback dohicky is like a motor) plus all the extra sensors and stuff just seems like extra cost and failure points for cars that are already getting ridiculously expensive.
This would be cool on some sort of niche car, like a cybertruck, or a sports car, where cost isn’t as much of an issue. But, for my basic DD, F that.
Conventional steering most certainly can fail catastrophically, so I wouldn’t be more concerned with this type.
I had a Ford Escape Hybrid with brake-by-wire. It had a master cylinder that fed into a sensor for the ECU, and then the computer controlled an electric pump to actuate the brakes. But something clever Ford did was that if you pushed the pedal all the way past the sensing positions, it would hit a hydraulic bottom where the master cylinder would directly pressurize the brake lines. So no matter what happens, if you stand on the brake pedal, the car will stop.
And 250k miles without a single problem with brake-by-wire or the hybrid drivetrain.
So, not really brake-by-wire, just pretend.
No, brake by wire with a mechanical override. Which is sensible if you must have brake by wire for whatever reason.
I get steer by wire is common in airplanes, but you don’t really have quite as much of a choice on a plane. If the power assisted steering fails, can a single person really move the giant steering parts of a cargo or passenger jet through a mechanical link? That seems unlikely. But a passenger car or truck? Most people could actuate the steering without power assist.
This feels like an overeager application of something from a different domain that really doesn’t carry over.
There’s no such thing as a failure-proof system, be it mechanical or electronic, but I’ve never heard of a mechanical steering system failing (as in a complete loss of control) with no warning of any type. But I can absolutely imagine steer by wire going from functioning normally to not functioning at all in a nanosecond.
I don’t know if this counts as no warning, but rock crawler guys bust tie rods and lose steering all the time.
My concern for steer by wire is because it’s relatively untested. It hasn’t been continuously improved an hasn’t received feedback from unanticipated failure modes. Redundancy is nice. Mechanical steering has failed before. Senna. Damn it, that STILL hurts.
Throttle by wire has a lot of redundancy built in as well. Its failure mode is to just not accept any input thus not process any input as output. If there is a complete electrical system failure and you cannot use the steering wheel to dictate the direction you want to travel, thats extremely dangerous. To be fair, in a vehicle with a steering shaft, there can be total failure of the steering by the I-shaft binding or breaking, but that can usually be caught early by regular maintainance and inspection. Same with a brake pedal that should always be phyisically connected from the pedal, the master cylinder and on to the calipers or wheel cylinders.
A lot of engineering went into a bad idea, except for the engineering that it could never fail. The fawning over the CT components is getting tiresome.
If this was made by Toyota, I might not be too concerned. (Ok, I would still be at least a little concerned.)
But Tesla? The company whose cars have bumpers that fall off in puddles? I’m having some serious reservations here. I know ZF is generally a solid manufacturer, but they have had some turkeys over the years as well.
I understand that some of the technical benefits are a potential game changer, but I don’t think I’ll be the first to jump on this particular train. I’ll give the tech a couple years to mature first.
This is my kneejerk reaction too.
I love to shit on the CT but I think steer by wire is the future and more manufacturers will start using it soon.
The future is often defined by the profit margin, not the intelligence of putting the system in place.
Why? I’m not seeing it. Power steering is well tested and failure modes well understood. Variable power assist (E.G. tighter steering at higher speeds), if you want it, has existed for decades. This seems like extreme complexity with no novel benefit.
In software and afaik other kinds of engineering, complexity is the enemy and good engineering practices try to eliminate it, or only adopt it when its benefits are significant. Steering didn’t need to be reinvented.
Because after a period of refinement I think it will be cheaper to build, easier to package, and eventually perform better.
As far as I can tell, if there is an electrical failure you’re still gonna lose steering. It’s only triple redundant as long as there’s electricity. Also, what benefit does this offer? You have three electric motors instead of just one, and you’ve removed the weight of…and intermediate shaft. Rear steer was gonna be steer by wire anyway, so that doesn’t count. I’m having trouble justifying this.
The redundancy should definitely be more about making sure the motor gets power always rather than having multiple motors. Three actuators seems like something they aped from the aeronautic world which I think makes less sense on a car.
It does sound like they learned something from the 737 MAX AOA system…
They always mentioned the tie breaker system to us at school in the context of the space shuttle
Airbus uses it in their fly-by-wire automation too.
This was my thought. What happens when the 48V voltage controller fails? Now there is no 48V system in the truck. I’m assuming that its designed to have the autopilot take over, slow you down, and hopefully avoid any objects in the immediate path. But I also assume it will leave you stranded in the fast lane on the freeway if thats where it happens.
What makes you think there’s only one? It could fail anyway — things do — but I think the better question is “does this catastrophically fail more than the current linkage based systems?” Given that I’ve seen vehicles in flames stranded on the freeway, my bet is that this will ultimately be more reliable. However, we’ll see.
Yes, all those vehicles in flames because their steering linkage failed. /s
Well, it is a catastrophic failure that happens pretty often. A more interesting thing to look at would be how often power steering fails (at which point you have to have the manual linkage.).I’ve never had it happen. Anyone have numbers for that?
Ask a late model Audi driver about their 48v generator. The Bosch (IIRC) units are frequently dying and leaving the cars with no electric power at all. We’re talking dead power steering, the works, at speed. I really am not an electrical expert, but lets assume there’s a buck converter or something stepping down pack voltage to 48v, what if that thing takes a dump? What kind of redundancy do we have there?
https://www.reddit.com/r/Audi/comments/11omvuw/comment/jbtjoy0/?utm_medium=android_app&utm_source=share&context=3
https://transistor-man.com/audi_48v.html
Well, I could make a snarky comment on German electrical systems (because holy crap, they suck) but in reality you need to look at how they do things for flight systems — which is what Tesla is copying for this — vs well, Bosch. Since Tesla is using 48v converters and more advanced power control systems, they appear to be running a dual power bus system. This is not a new thing — aircraft do it, milspec systems do it, and we do it with 48v in carrier networking. It appears the Audi built a system with a single point of failure. Tesla didn’t.
I keep seeing this apples to submarines comparison, but aircraft and automobiles operate in completely different environments with (usually) vastly different allowable time scales for reaction (not many curves, debris, or other users in close proximity in the air that require immediate and constant vigilance and correction), outside assistance that can help diagnose and clear the path of other users, operator training (there barely is any for automobile drivers), inspection, and required and logged maintenance by trained personnel. A plane and a boat are better comparisons.
Not really as apples to submarines as you think. The root issue here is catastrophic failure, and the likelihood of injury. The different environments argument is interesting, but doesn’t really hold up. Response time is governed by the feedback loop and the response time of the servos is *very* well known at this point (You should take a closer look at the newer “anti turbulance” systems on aircraft if you think they have a longer response time). Assuming that ground vehicles have it worse environmentally ignores de-icing and other environmental hazards aircraft regularly encounter. You think runways are really less dirty than roads? 48v systems are well understood, control theory is well understood, and you have to admit there’s a Musk company that really nails control (landing a Falcon 9). My money is on this working out fine.
I don’t understand this comment at all. Cars do not have control towers they communicate with and they don’t tend to operate in vast stretches of open space and in three axes (except generally near airports, see: control towers that can clear an area in an emergency) and rarely any need for constant changes in speed and direction, so there’s often plenty of time to sort out issues. They even have a second pilot! We already have issues with people hitting the accelerators in EVs and having too little time to think and respond before crashing through buildings, into cars, etc. and that’s people hitting the wrong pedal or hitting it too hard. While those are likely operator error events, the problem of short time and high consequence is the same, perhaps worse in the event of steering as the EV acceleration issues generally take place from a stop, limiting their impact speed while a steering failure can take place at any speed and, while a wrong pedal incident might result in no issue (nothing in front before they correct), a loss of steering is less likely to be so lucky regardless of time to react. Ultimately, this is a completely stupid idea that serves no purpose or improvement over superior systems that work. I swear, if Tesla made hexagonal wheels, people would defend their BS (not so far fetched considering their wheel cover problem that an elementary school kid could have foreseen).
Control theory has nothing to do with control towers. It has to do with closed loop response of a system to input. These loops are essentially the same if you’re in the air, guiding a missile, or trying to get a car to drive itself. We’ve solved this problem for missiles and aircraft — systems that require a very fine level of control. One hidden advantage of this is “control law”, an operating envelope that is determined by the system. The vehicle is not allowed to operate outside of the “law”. In this case, imagine a scenario where a spurious input from the user — bad breaking, driving into a wall, “sudden” acceleration — is not allowed by the “law” of the cars systems. This will filter out a lot of human error. You don’t see benefit in that?
Also mechanical linkage won’t really help you steer a 787 full of people.
And that’s why it isn’t used. It’s a necessity, unlike for a car where it offers no advantage but highly dubious ones and plenty of potential liability.
Ah, yes — Bosch electricals. The thing that made Land Rover owners miss Lucas electrical systems. 🙂
And Tesla is laying people off left and right, probably including some of the people that they need to make sure this new system keeps doing what it should and doesn’t succumb to the myriad situations that happen out in the real world over millions of miles driven.
I have and I drove it as a manual rack. Just had to get the wheels starting to roll and it was fine. Most steering failures you’ll see will be from worn out tie rods or ball joints that owners ignored for quite a while, which this POS still utilizes.
So out of sample N=2?, we have one hit. The interesting thing about steer by wire is that they system could detect this wear and tear by comparing the input and output jitter with the numerous sensors it has to work with. Since the only sensor in the loop of current steering is uncalibrated humans, this might get interesting. The real answer will come from seeing how it works out in the real world, much as they did with fly-by-wire for aviation.
Just as the mechanical system does through obvious steering play that typically stupid people ignore until it fails. Unless the CT gets bricked when there’s an issue, it solves nothing, but does introduce the possibility for greater problems. This is also a “truck” and people might even try to do truck stuff with it. Some of that might involve fording water which could induce failures in an electrical system, making me even more against this even if it was built by a company that could generally be trusted, like Toyota, certainly not Tesla who can’t even issue an OTA update recall properly, though I think that latest one is less about incompetence, than typically doing the bare minimum they can get away with, exemplifying their disregard for rules and default attitude of dodging responsibility as much and as often as possible.
Mechanical systems have no established method to detect excessive wear other than manual inspection, which people don’t do. Sensor based feedback systems can self monitor and report — or even disable vehicle operation at startup — to mitigate an unsafe condition. It’s just software. The aviation industry is doing this now with “digital twin” technology. EV’s are next.
Yeah, either they neglected to mention that the motors were fed from separate power sources, or it seems like a loss of power is a critical failure. I’m hoping for the former, but I’m not trusting enough to assume.
Beyond that question, I also wonder what the redundancy for the control module is, if any.
I don’t understand why either, other than to be different and techy. I could get behind it if there were some kind of packaging restraints, but that doesn’t seem to be the case.
The benefits are dumb bullshit nobody asked for and adds no real world value, like variable pitch speed-sensitive steering (which already existed) with greater range of operation and, uh, there’s the uh . . . nope, that’s it. It sucks that the name of such a genius has been used on cars whose focus seems to be well-engineered bad ideas.
Musk to engineer: I want a foot massage machine that crushes peoples’ feet.
Engineer: Why would you want such a thing?
Musk: Can you make it, pedo boy?
Engineer: [shrugs] Yeah, OK, I’ll have you something by the end of the week.
I got to see first hand back in college what happens when steer by wire loses power, I was watching/filming from the sidewalk, which was nice since my friend just about soiled his pants as the passenger. It was a purpose/scratch built test car, and one day while hitting a couple aggressive dips at increasing speeds to test the diagnostic controls on the system, the RAM chip in the onboard computer physically popped out, disabling the entire system, and sending the car skidding into the curb across the road at 30+ mph. Luckily it was in a test with no traffic, so no real harm done, but certainly not something you would want to experience in normal driving.
I’m waiting for the lawsuits that will come with the first accident caused by the total steering failure of a drive—by-wire car after a rat, squirrel, or mouse chews through all that “redundancy.”
Experienced, aggressive accident attorneys are waiting to take your call at
1-800-SUEMUSK
Oh hell no. Can’t wait to hear about the cyberclustertruck that careens out of control after a mouse chews through the cables. Looks like high risk and no reward… there’s no reason to reinvent steering in this monster. They certainly should have the physical space to put a mechanical link. This should have never been approved for us roads.
Got me by 30 seconds.
Seeing your rodent comments come in back to back was hilarious
You’d think Musk would’ve considered this since he part of the same genus.
What do you have against rats?
Technically, muskrats are voles.
Elongated Muskrat
RATS.
Better keep the Beaverian Motor Works vehicles out of the garage then …