
Hello Autopians and welcome to the first edition of Ask an Engineer. Last week I introduced myself along with the idea for this “Ask an Engineer” column and asked you to send in your car questions. And wow! You did not disappoint! I’m still trying to put the pieces of my inbox back together after you all blew it up. Today I will start to answer some of your question, so keep them coming!
A common theme that ran through quite a few emails was: “Is there a difference between the suspensions for an EV and an internal combustion engine (ICE) car?” As you might expect, the answer is “Yes, and No.” Due to the differences in performance and size between an electric motor and an ICE, EV’s present unique challenges but also provide unique opportunities for a chassis engineer.
The Steering Implications Of Ditching The Internal Combustion Engine
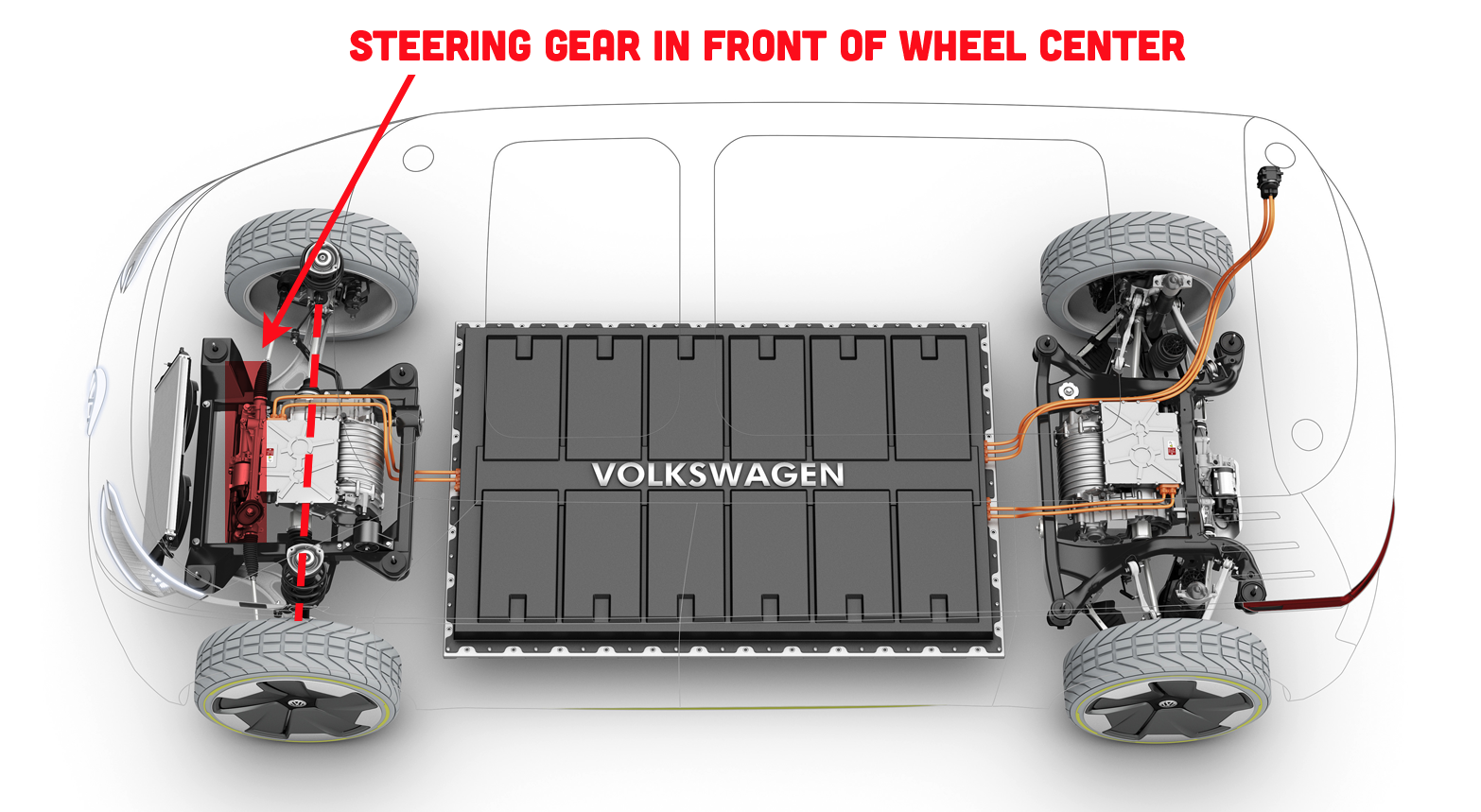
Since electric motors are so much smaller than ICEs, there is far more space in a vehicle where the ICE used to be. This space can now be used to package a front trunk or electronic modules that EVs need, but it can also be used to package suspension components in ways not possible before. In particular, the steering gear can now be placed where it is most advantageous, which in most cases is in front of the wheel center. Previously, the engine oil pan dictated where the steering gear could go and for front wheel drive cars with the engine placed sideways (or east/west) this meant that the steering gear was almost always behind the wheel center.
Putting the steering gear in front of the wheel center has advantages for steering feel and handling (I’ll talk more about that in a future blog — it’s worth mentioning that rear/mid-engine ICE sports cars like the Ford GT and Porsche 911 have racks mounted ahead of their wheel center lines) so this is a clear advantage of EVs. A good example of this is Volkswagen’s new MEB platform which underpins the ID.3, ID.4, ID.6 and the upcoming replacement for the iconic VW bus (see above). While the previous VW MQB platform placed the steering gear behind the axle centerline (see below), the new MEB platform places it in front. VW clearly saw the advantages of a front placement of the steering gear and took full advantage of the package opportunity provided by the electric motor.

Electric motors open up space higher up in the engine compartment as well and could allow for a double wishbone front suspension — which is what Tesla uses — since there are no valve covers or cylinder heads to get in the way. On the other hand, electric motors are larger than a differential so there is generally less space available in the rear of EVs. This can make packaging all the necessary rear suspension parts more challenging in an EV that has a rear motor.
Electric Cars Introduce Surprising Engineering Challenges, Like Nuts Coming Loose

Of course electric motors also have their challenges. One issue we ran into during the development of one of the high powered EV’s I was involved with came as a complete surprise to all of us. We noticed during our testing that the nuts holding the CV joints to the rear suspension kept coming loose. No matter how hard we tightened them, they would still come loose. After a lot of work we discovered that the axle nuts were coming loose due to the high torque reversals happening when going from “throttle” on to “throttle” off. Since EVs use regeneration to recharge the battery during braking and deceleration, there are large reversals in drive torque on the “throttle” vs off the “throttle.” No ICE would ever produce such high reversals of torque so frequently. Our solution was to use a special type of lock washer made by Nord-Lock under the CV joint nut. These washers have a unique design that causes the nut removal torque to be significantly higher than the installation torque. Problem solved!
For the most part though, the suspension for an EV can be very similar to an ICE suspension. The same things are important: ride, handling, comfort, and those are not dependent on the type of motor that is used. You will notice that the suspension systems in EVs look a lot like those in ICE cars with one exception.
Death Of The Live Axle?
 You may have noticed that there are no EV’s at the moment with live axles. This may change in the future, but there are very good reasons why live axles are not ideal for EV’s.
You may have noticed that there are no EV’s at the moment with live axles. This may change in the future, but there are very good reasons why live axles are not ideal for EV’s.
The first is that live axles need a drive shaft that moves up and down with the suspension. Unfortunately, this driveshaft runs down the middle of the car in the same place where it would be ideal to package batteries.
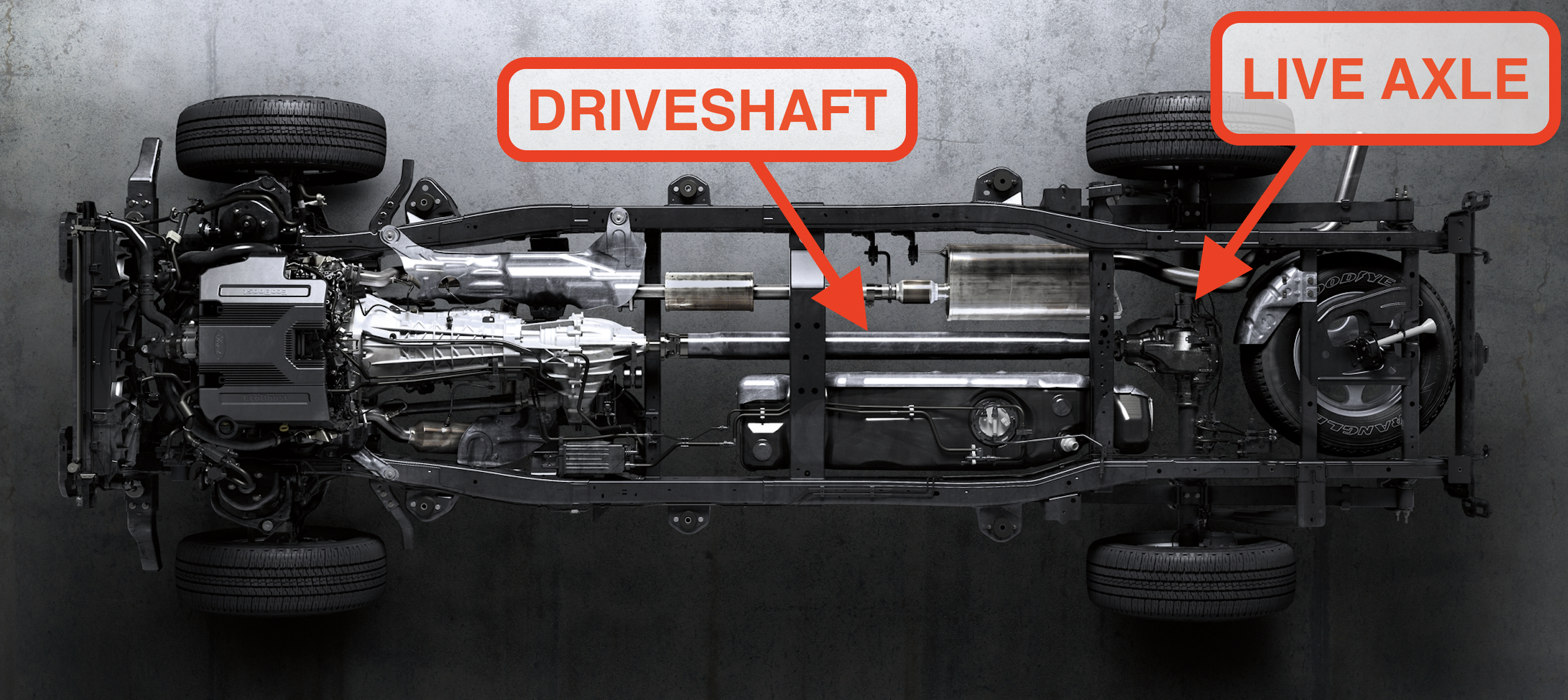
Batteries take up a lot of space and are heavy so you want them to be mounted low and as close to the center in the car as possible. Unfortunately, that’s also exactly where the driveshaft is. Having a moving driveshaft would take away too much space for the batteries which would hurt range too much. A perfect example is the new Ford F-150 Lightning. Ford ditched the live axle (shown above) and put in a new independent rear suspension just for the Lightning (see below). I think Ford knew it could never make the Lightning work well enough as an EV without going the extra mile designing a whole new suspension. Believe me, Ford would never have spent that kind of money on the F-150 if it didn’t believe it was absolutely necessary. I think you will see this happen more often as existing vehicles are converted to EV.

The other reason is that a traditional differential with the typical ring and pinion gear — a pairing that turns the power 90 degrees — is not a very efficient beast. The ring and pinion depend on a sliding action between the gears in order to minimize noise, and this adds friction. Friction is an energy loss and EV’s are all about minimizing energy losses so that you get as much range out of a battery charge as possible.

I will say that there are some companies out there developing electric motors that are mounted on a live axle (see below) but as a suspension engineer, I would be very concerned about the increased mass from these motors. Unsprung mass is the enemy of good ride and handling and is the reason live axles are not in use much anymore. Increasing unsprung mass with the addition of an electric motor to the axle would be the wrong way to go, in my opinion.

I don’t think we will see many companies building EV’s with live axles unless they are desperate to get into the EV market with an existing product and they just don’t want to spend the money on a new suspension. I highly doubt the resulting product will be as competitive as it could be.
Well, that’s it for this week. Keep sending in your questions to AskanEngineer@autopian.com and we’ll see you again next week. Same Bat time, same Bat channel! (oh boy, I’m really showing my age now).



Hmm, didn’t realize the Lightning had gone IRS. It’s probably not a big deal right now since they’re lousy for any extensive towing, but I know people who tow a lot with IRS vehicles tend to have trouble with tires wearing badly because when the rear suspension squats under load it changes the camber of the wheels. Maybe the suspension geometry in this case can account for that?
The Lightning has a training arm rear suspension. While I’m sure they went that route to increase package space for their rear drive unit, one windfall in regards to geometry under load is that for a trailing arm suspension typically the camber and toe curves are very mild or close to nil, so they don’t change much throughout the travel.
*Trailing arm
How do we edit or delete comments on mobile?
Great read, thanks.
“Our solution was to use a special type of lock washer made by Nord-Lock under the CV joint nut. These washers have a unique design that causes the nut removal torque to be significantly higher than the installation torque. Problem solved!”
As long as the two halves stay concentric while being torqued! This has caused me a lot of pain/reliability investigation.
Personally, I would have just used an over-engineered castle nut. You put a pin in that mofo, and it goes nowhere.
Axle nuts are already torqued on pretty tight usually over 150ft-lbs which is crazy that they backed off. I have to break out the most badass 1/2″ impact wrench I have to bust them loose. I’m sure anyone who services the axles will be cursing your name. Speaking of axles, did you have any problems with the axles themselves shearing? If the torque load is spinning axle nuts off I’m sure it is also wreaking havoc on the axles.
That was my thought as well. IIRC, the axle nuts on my truck were north of 250 ft-lbs. That’s already enough torque to make me nervous because if something slips or breaks it could get ugly.
I would guess that an EV would significantly beefed up shocks to compensate for the weight. It would be cool to come up with a system that captures some of the energy that the shocks convert to heat. Like forcing hydraulic fluid through an orifice or using the motion of the piston to induce an electrical current in a coil.
This idea gives me nightmares about 90s Citroen, Benz, and BMW hydraulic self leveling suspensions. And in the case of the BMW was also tied into the brakes and steering. So if you blew a high pressure line, you’d immediately lose all 3.
That’s an interesting idea. Seems like the type of thing a relatively unrestricted electric racing series could come up with, a competitive edge that could translate into consumer benefits for manufacturers if it could work with road cars.
Wow that actually was surprising, and of course very informative!
I thought you were just going to mention that they’re heavier and maybe unsprung weight of the low-mounted battery pack or something.
Could you comment a bit on the suspension / steering trade offs for using wheel motors instead of drive motors + shafts? It would seem that adding unsprung mass is BAD, but you also get to do some really nice packaging things and torque vectoring options open up too…
I believe it would also solve some other problems associated with live axels. There wouldn’t be anymore chassis torque twist – off roaders and drag races would appreciate that. Some of the suspension compromises on straight axle cars also revolve around maintaining the pinion angle – that would also be gone.
I am curious about adoption in the off road market in vehicles with no live axle. Jeep owners tend to take pride in the fact that both suspensions are live axles. Most off road vehicles now have IFS which gets most of us what we need. My old FJ was like that. I’m sure engineers are working on suspensions that will compete perfectly well as the live axle in the rear (the f150 doesn’t require a live axle really), but the question is, can enthusiasts be convinced that fully independent suspension can mimic the performance they are used to?
I doubt independent axles will ever be popular with rock crawlers. People occasionally argue that Independent axles have less clearance than solid axles when flexed. I don’t know a good way to describe it without a picture, but it makes sense. solid axles are also much simpler, cheaper, and I think stronger than independent axles. there are a few rock bouncers that run IFS and IRS though. I don’t know about other parts of the off-roading community. I only go crawling with my old jeep.
anecdote: the only guy in our group who ran IFS had a Chevy 2500 and was constantly breaking tie-rods. he finally beefed them up so they wouldn’t break and then ripped the idler arm bracket off the frame. I think he made it into one of BSF recovery team’s videos on youtube.
There is a lot of work being done on independent suspension in off road applications. 8 of the top 10 unlimited class finishers had independent front axles at King of the Hammers this year. It is more complicated, but is progressing very quickly. The biggest problem is the amount of work it requires to lift an independent suspension versus a solid axle and how wide they tend to get for similar suspension travel.
Wow, incredible insight, especially about the steering!
One of the reasons we bought our 2020 Nissan Leaf how closely it follows standard design techniques. It looks like they took a conventional car and just replaced the motor with an electric.
Technically I guess this is a suspension related question.
With the trend towards cartoonishly large wheels, how does the added unsprung weight of wheels play into the design here? I understand, large wheels can offer clearance for larger brakes, but with regenerative braking, I would imagine EVs could move on from this. Or does the significant weight addition of batteries negate this and reintroduce the need for larger conventional brakes too?
Giant wheels just seem to be such a packaging waste needing larger wheel wells and steering clearances.
I don’t really have any insightful comments or questions to ask, but I just wanted to express my appreciation for this site as a place where an informative write-up like this can exist.
The axle with integral motor will be a big player in the medium & heavy commercial trucks. Essentially the same clearances as current axles, but no need to find a home for the motor & a shaft. I’m not sure, but the weight may not be that much more than the giant diff and the driveshaft weight supported by the axle.
Some heavy vehicles mount the electric motor behind the rear axle, between the frame rails and use a short drive shaft. This keeps the center of the vehicle open for batteries.
Is the steering rack location’s impact on handling true regardless of manual vs electronic steering? Seems like the latter could be tuned for whatever characteristics the engineers desired.
Motor-in live axles may be bad for clean sheet designs, but they seem great for drop-in conversion projects.
Magna is marketing their eBeam concept to OEMs, not the conversion market, so they must think there are good applications. I imagine they figure that handling and ride comfort is less critical in their target market of delivery vans.
I may be badly mistaken, I guess we’ll see when the next article comes out, but I’d think some of the difference would be down to physics regardless whether the steering is electric, hydraulic or manual.
I believe front or rear steering linkages are different because of the caster angle where a wheel hub attaches to the suspension. I’m thinking the angle between attachment points creates a virtual center the hub rotates around and that placing the steering point in front allows it to be closer to that virtual center while the rear may be physically blocked from being as close. So the front steering linkage would take less torque to move the wheel and have a quicker response no matter how the movement is initiated.
To be clear I’m not an engineer and the only source I have for this is imagining suspension parts moving around so a few grains of salt might make it easier to swallow, lol. We’ll see!
I think its mostly about placing the tie rod with heaviest load (the outside tire when turning) in tension vs compression/buckling. This has some ramifications on feedback and tendency to over/under steer, the size of components, etc. I’m sure it will get explained better when he chooses to write about it.
“Our solution was to use a special type of lock washer made by Nord-Lock under the CV joint nut. These washers have a unique design that causes the nut removal torque to be significantly higher than the installation torque. Problem solved!”
I have smashed my knuckles many, many times at work undoing nuts and bolts secured with a nordlock. Each time you know it’s going to happen but the abrupt release means you can’t easily avoid it.
Yeah, if you can get an impact wrench in there, that problem is solved, but many times you can’t.
Chain mail gloves can be handy sometime too!
*Proceeds to look up mithril chain mail gloves in the snap-on catalog*
Subaru always put the rack in front of the wheel centerline but that is a N/S engine. I think, as a rule of thumb, the calipers are on the opposite side of the wheel centerline from where the steering rack is. Looking forward to the article where it explains why it’s beneficial for the rack to be in front.
Yep, was my first thought as well.
Due to the AWD, Subaru engines are pushed entirely in front of the front axle. So there’s still room for the rack behind the oil pan, but still be in front of the wheel.
I just came to this conclusion as well in regards to being opposite the caliper. I was changing the brakes on my Audi over the weekend and noticed the steering ahead of the wheel center and corresponding trailing caliper.
Which brings me to today I was again looking at the new Nissan Z and the leading calipers stood out me which they never have before when looking at the car. This lead me to assume the steering rack is behind the wheel center. I then started thinking this must be why most performance vehicles have trailing calipers. A simple detail I’ve overlooked for years now makes sense and stands out because of this article.
I learned the following lesson from using regen in my custom-built pedal-electric microcar:
“We noticed during our testing that the nuts holding the CV joints to the rear suspension kept coming loose. No matter how hard we tightened them, they would still come loose. After a lot of work we discovered that the axle nuts were coming loose due to the high torque reversals happening when going from “throttle” on to “throttle” off. Since EVs use regeneration to recharge the battery during braking and deceleration, there are large reversals in drive torque on the “throttle” vs off the “throttle.” No ICE would ever produce such high reversals of torque so frequently. Our solution was to use a special type of lock washer made by Nord-Lock under the CV joint nut. These washers have a unique design that causes the nut removal torque to be significantly higher than the installation torque.”
My solution was the same, with the addition of reducing max regen torque via reprogramming the controller. I have deceleration via regen comparable to the engine brake in an automatic transmission equipped ICE car when I activate the rear brake lever.
Currently my rear wheel is unsuspended while my front wheels have air suspension. I designed it to where my weight is centered over the front wheels so its ride quality is quite acceptable without rear suspension, sort of akin to a vintage sports car or a cheap truck. I’m eventually going to hack the rear apart to add a gas shock to it as well. My 90 lb vehicle has a 17 lb electric hub motor in the rear wheel, and you can notice all of the unsprung weight when that rear wheel hits a pothole. Once I have a rear suspension on it, I’m confident ride quality and handling will improve greatly.
For those interested, there are pics of the vehicle in my profile.
why not use the cv axles with the notch like the regular cars do?
It will bend the part you knock in to lock it eventually
I designed it to use a bicycle drivetrain for propulsion independently of OR while using the electric motor. The motor is an in-wheel hub motor with a freehub body for my rear gearing. I can turn the motor completely off and sprint to 35 mph with just my legs propelling it and holding 22-23 mph on flat ground takes as much effort as a light jog. When I turn the motor on, I can do donuts, accelerate like a car, and top out at roughly 50 mph. It is also stable at top speed. In some jurisdictions, it is still legally a “bicycle” when operated in this manner, but in others that have codified ebikes into law, I have a switch to limit motor output to 750W up to 28 mph so it can be a “class 3 ebike” in jurisdictions that have defined it. By allowing it to be operated on human power alone, it is easier to test its efficiency after making changes since I can’t put out nearly as much power as an electric motor.
I’m going to build one capable of topping out at 100+ mph when using the motor, and will be aerodynamically slippery enough to reach 45+ mph on flat ground pedaling it with the motor disabled. It’s going to need full suspension, light-duty motorcycle rims, solar race car tires, a roll cage, hydraulic disc brakes, Cotter pin axles, and other changes to be able to reach this speed without killing me. And I’m going to keep the entire vehicle under 100 lbs to retain its pedalability with the motor disabled. 10 kW of electric assist should be good for 0-60 mph in around 7 seconds.
The idea is to eventually build a car without any bicycle drivetrain, and shoot for 1 horsepower per pound of vehicle weight, with an electric hub motor in each wheel for AWD without any driveline losses. Such a thing would have ridiculous acceleration. If the vehicle weighs 100 lbs, carries a 200 lb load(rider + tools + luggage), and has about 150 horsepower with AWD, 0-120 mph acceleration could be somewhere around 5 seconds…
Whatever you do, don’t forget to keep adding lightness. 😉
Part of the “add lightness” philosophy should ALSO apply to wind loading. Lotus did a good job of that with its first Elite sports car, scoring a 0.29 Cd, without wind tunnel testing, thanks to Frank Costin knowing what he was doing.
If I ever build a custom two-seater sports car, it will have offset seating like a VW XL1, an overall size comparable to a Porsche 550 Spyder, and be a streamliner with a Cd in the mid 0.1X region. I’d start by scaling a Milan SL velomobile into a 4-wheeled 2-seater vehicle. The front track would be wider than the rear track, in order to keep the shape needed. Whatever styling there was would ape the Jaguar D-Type, Ferrari 250GTO, 2017 Ford GT, Alfa Romeo Disco Volante, and Alfa Romeo BAT concepts, and function would be the emphasis of the design, not looks. There would be just enough downforce for stability at top speed, and no more, in the interest of keeping drag as low as possible, mostly through ground effects and a rear diffuser. With glass fiber monocque sandwich construction with innegra fiber, it’s possible to have a complete vehicle weighing around 800-900 lbs with front and rear independent suspension lugging around a 20 kWh battery pack, while having mechanicals solid enough to handle 160 mph. It would be light enough to get away with using an overpowered ebike motor, cheap Chinese microcar hub motor, or electric motorcycle hub motor in each wheel. Putting 150 kW to the ground with AWD would be amazing, and it would be light enough that those tiny motors could prove reliable, considering they will each have less load than a single-motored 100 lb ebike or 400 lb e-motorcycle carrying 200 lbs. And it would only need about 40 kW to maintain top speed of 160 mph if it got a CdA of about 0.15 m^2. With an ebike controller powering each wheel motor, instantaneous slip detection and vector control could allow a setting for the driver to lightly press the accelerator for it to maintain constant speed through a corner, maximizing lateral grip.
Unfortunately, I don’t know crap about building a monocoque chassis from scratch yet. Even my microcar is a body on frame design.
For now, I’ll have to settle with finishing the electric Triumph GT6, which once I have the aeromods in place, will require twice as much power for the same performance as the above hypothetical 2-seater concept. Except the GT6 is not initially going to have anything close to that, maybe 100 kW peak for a 950 kg mass, for 0-60 mph acceleration that should be comparable to a new Miata, so it should still be quite fun. But won’t be embarrassing any supercars. Maybe it will if I later upgrade to a drive unit from a Tesla Model 3.
Man, I just checked out your microcar pictures and I feel like a post about it would do well here. Do you have any video of it in action?
I do not have any recent video of it in action, nor will this site let me post a link without rejecting my comment pending moderation. I have an old video of a previous prototype doing 30-40 mph down the street unmotorized, down a hill, but again, the site won’t let me post it.
It’s a work in progress and will eventually have working turn signals, windshield, roof, be fully enclosed, and with a much more slippery body based upon a Milan SL velomobile I purchased last year. I want to build the ultimate low-cost transportation appliance, and I also want it to have some very spirited performance.
The current iteration accelerates like a sports car from 0-10 mph, like a slow car from the Malaise era from 10-30 mph, and tops out around 50 mph if the battery is fully charged. I measured a 0-30 mph acceleration time of 6.5 seconds, which is quite slow by car standards, but do consider that it only has 2.5 kW peak at the moment. It can lurch ahead of a Porsche Boxter or a modern V6 Mustang at a stop light if I’m careful enough not to lose traction and I won’t get overtaken until about 10-15 mph. It definitely has enough torque to get going, I just don’t yet have enough power to produce that torque to an appreciable speed.
It will get a lot faster once I make some necessary upgrades to it. It’s a death trap for sure.
Also, I get a 150-200 mile range @ 30-35 mph cruising speeds on a 1.5 kWh pack. This sort of efficiency is measured in the equivalent of thousands of miles per gallon. An actual car could be built off of the same design principles. Put a 1 cylinder 49cc diesel engine in something like this, and it would get thousands of miles per gallon at highway speeds.
I never understood why the European companies never did diesel hybrids. A 1.3L TDI VW + a hybrid setup would probably get 75+mpg in a Golf or a Polo and have low enough emissions that the whole scandal thing wouldn’t be necessary.
For some reason it will not allow to reply to 50drunksinabar…i guess it is a limitation of nesting quotes on this platform.
The reason that diesel hybrids aren’t more popular is that diesel engines and electric motors don’t complement each other as well as gas and electric.
Electric motors are best when gasoline engines are worst, moving the car from a stop. Gasoline is in its power band when electrics are running best when electrics are less efficient.
Electric motor and diesel motors are both best in the same part of their power band at the same times, so there is diminishing returns on combining the two.
Well that was surprising.You went in directions i didnt expect. Very cool
I look forward to the explanation on forward mount steering
Pretty sure my MG has the steering rack in front of the wheels. Is putting the steering rack behind the wheels more of a FWD thing?
“Previously, the engine oil pan dictated where the steering gear could go and for front wheel drive cars with the engine placed sideways (or east/west) this meant that the steering gear was almost always behind the wheel center.”